
Forma pode revolucionar técnica usada por robôs para pegar e rotacionar coisas.
Inspirada pela forma de pouco esforço que os humanos lidam com objetos sem vê-los, uma equipe de engenheiros da Universidade da Califórnia San Diego desenvolveu nova abordagem que permite a uma mão robótica a rodar objetos unicamente por meio do toque, sem depender da visão.
Com essa técnica, os pesquisadores construíram um protótipo que pode rodar suavemente ampla gama de objetos, desde pequenos objetos, latas e, ainda, frutas e vegetais, sem machucá-los ou esmagá-los.
Mão robótica
- A mão robótica realizou essas tarefas usando apenas as informações que adquiriu com o toque;
- O trabalho pode ajudar no desenvolvimento de robôs que podem manipular objetos no escuro;
- A equipe, recentemente, apresentou seu trabalho na “Robótica: Conferência de Ciência e Sistemas 2023”.
Construção
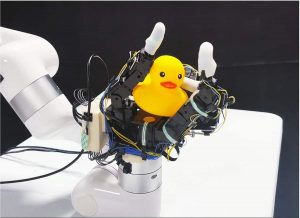
Para a construção do sistema, a equipe adicionou 26 sensores de toque à palma e aos dedos de uma mão robótica de quatro dedos. Cada sensor custa cerca de US$ 12 (R$ 57) e serve para uma simples função: detectar se um objeto está sendo tocado ou não.
O que permite essa abordagem única é que ela depende de muitos sensores de toque de baixo custo e baixa resolução que usam sinais simples e binários – tocou ou não tocou – para executar rotações robóticas em mão. Tais sensores são distribuídos sobre larga área da mão robótica.
Isso contrasta com uma variedade de outras abordagens que dependem de alguns sensores de altos custos e altas resoluções de toque afixado a pequena área da mão robótica, primariamente nas pontas dos dedos.
Há alguns problemas com essas abordagens, disse Xiaolong Wang, professor de engenharia elétrica e computação na UC São Diego, que liderou o estudo. Primeiro, ter número menor de sensores na mão robótica minimiza a chance de entrarem em contato com o objeto.
Isso limita a habilidade de sensibilidade do sistema. Em segundo lugar, os sensores de toque de alta resolução que provêm informações sobre a textura são extremamente difíceis de simular, sem contar que são extremamente caros.
Isso faz com que sejam mais difíceis de serem usados em experimentos da vida-real. Por último, várias dessas abordagens dependem da visão.
Aqui, usamos solução muito simples. Mostramos que não precisamos de detalhes sobre a textura de um objeto para fazer essa tarefa. Precisamos apenas de sinais binários simples se os sensores tocaram o objeto ou não, e eles são muito mais fáceis de simular e transferir do mundo real.
Xiaolong Wang, professor de engenharia elétrica e computação na UC São Diego
Os pesquisadores notaram ainda que ter grande cobertura de sensores de toque dá à mão robótica informação suficiente sobre a estrutura e orientação 3D dos objetos para rodá-los com sucesso sem a visão.
Primeiramente, eles treinaram o sistema rodando simulações de uma mão robótica virtual rodando uma série de conjunto de objetos, incluindo aqueles com formas irregulares.
O sistema avalia quais sensores na mão estão tocando o objeto a qualquer momento durante a rotação. Ele também avalia as posições atuais das juntas das mãos, bem como suas ações prévias. Usando essa informação, o sistema diz à mão robótica qual junta precisa ir e para onde precisa ir no próximo ponto no tempo.
Os pesquisadores, então, testaram o sistema na vida real com objetos que ainda não havia sido encontrado. A mão robótica pôde rotacionar uma série de objetos sem protelar ou perder a pressão sobre o objeto.
Entre os objetos, estavam tomate, pimenta, lata de manteiga de amendoim e um pato de borracha, o mais difícil para ser rotacionado por conta de seu formato. Objetos com formas mais complexas demoraram mais a serem rotacionados. A mão robótica pode, ainda, rotacionar objetos sem diferentes sentidos.
Agora, Wang e sua equipe estão, agora, trabalhando para estender sua abordagem para tarefas de manipulação mais complexas. Estão atualmente desenvolvendo técnicas para permitir às mãos robóticas para pegar, arremessar e fazer malabarismos, por exemplos.
Manipulações em mão é uma habilidade muito comum que os humanos têm, mas é muito complexa para robôs dominarem. Se dermos aos robôs essa habilidade, elas abrirão a porta para os tipos de tarefas que eles podem realizar.
Xiaolong Wang, professor de engenharia elétrica e computação na UC São Diego
FONTE: https://olhardigital.com.br/2023/07/26/ciencia-e-espaco/mao-robotica-usa-o-tato-para-girar-objetos/