
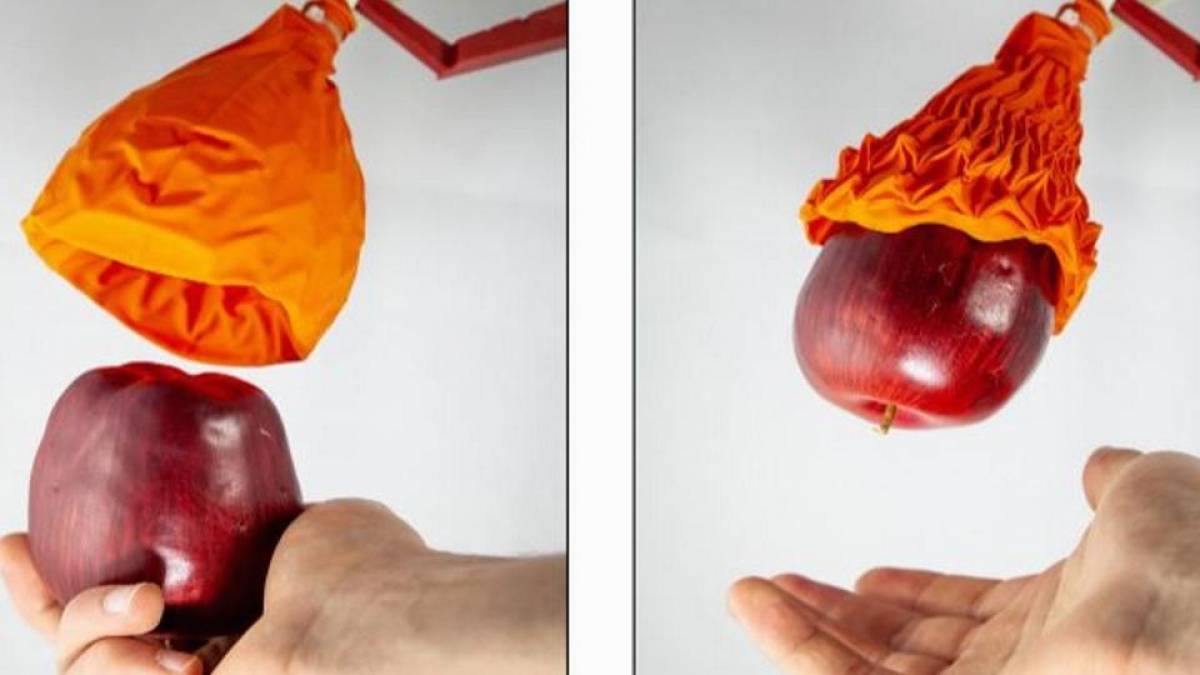
Garra gira em torno de uma estrutura de origami, impressa em 3D e feita com um tipo especial de plástico e que pode se adaptar à forma do que está pegando
Um robô desenvolvido pelo MIT é capaz de pegar objetos tão frágeis quanto uma luva, mas também aqueles que são 100 vezes maior que o seu próprio peso. Isso acontece porque ele conta com uma pinça flytrap, semelhante a uma boca de flores carnívoras, e não com garras.
Além desse diferencial, ele acaba deixando para trás outros robôs mais limitados, que possuem a função de carregar coisas leves ou a de carregar objetos muitos pesados, uma vez que este autômato é capaz de realizar ambos. Confira o vídeo do dispositivo em funcionamento:
https://www.youtube.com/watch?v=zqCXva0uv3c
O truque para que seja possível exercer essas habilidades depende de uma combinação de física inteligente com força bruta. A garra gira em torno de uma estrutura de origami, impressa em 3D e feita com um tipo especial de plástico e que pode se adaptar à forma do que está pegando sem comprometer sua força. Em seguida, ela cria um vácuo que mantém os objetos firmes, enquanto uma pele feita de tecido oferece uma melhor superfície de aderência.
Apesar de tudo isso, ainda existem limitações. Uma vez que seu formato prioriza objetos circulares, ou cilíndricos e sólidos, ele enfrenta problemas para capturar algo plano e que tenha furos sob a superfície. Entretanto, sua utilidade e forma podem ajudar a desenvolver robôs mais capazes para capturar itens. É possível que esse modelo seja implementado em áreas mais específicas também, como no setor médico para realizar algo delicado, ou em depósitos para organizar caixas.
FONTE: OLHAR DIGITAL