")

Robô bioinspirado
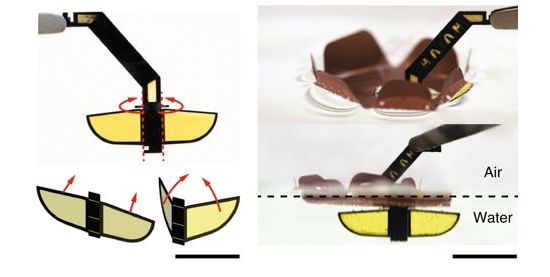
Este pequeno robô com jeito de inseto usa sapatas multifuncionais que lhe permitem andar sobre qualquer tipo de terreno – inclusive sobre ou sob a água.
As sapatas aproveitam a tensão superficial da água quando o robô precisa flutuar nadar, mas também podem ser usadas para aplicar uma tensão para romper a superfície da água quando ele precisa afundar.
O processo é chamado de eletroumectação (electrowetting) – a capacidade de controlar eletricamente como os líquidos interagem com superfícies sólidas mediante a aplicação de uma tensão elétrica.
O microrrobô pesa 1,65 grama (o equivalente a um clipe de papel grande), pode carregar 1,44 grama de carga adicional e pode remar com uma frequência de até 10 Hz.
“Esta pesquisa demonstra que os microrrobôs podem aproveitar a física de pequena escala – neste caso, a tensão superficial – para executar funções e capacidades difíceis de serem executadas pelos robôs maiores,” disse Kevin Chen, da Universidade de Harvard, nos EUA, criador do robô.
Robô que anda, nada e mergulha
Mover-se sobre a superfície da água permite que o microrrobô evite obstáculos submersos e reduza o arrasto. A propulsão é feita por quatro pares de abas assimétricas – explorando a interação instável entre as abas passivas e a água circundante, o robô gera movimentos de natação semelhantes aos de um besouro mergulhador (Dytiscus marginalis). Isso permite que o robô efetivamente nade para a frente e gire para mudar de direção.
Quando mergulha, ele usa o mesmo movimento empregado para andar sobre terreno seco. Mas sair da água é um esforço descomunal para uma máquina tão pequena, já que ele precisa vencer a tensão superficial que lhe ajuda a flutuar – o truque consiste em escalar uma pequena inclinação no terreno, que ajuda a quebrar a tensão da água.
O próximo objetivo da equipe é fazer com que o robô seja capaz de sair do mergulho e voltar para terra seca sem precisar de uma rampa – eles vão começar testando adesivos inspirados nos pés das lagartixas.
FONTE: INOVAÇÃO TECNOLOGICA